Nybble – грациозная робокошка на Arduino

Впервые о Nybble заговорили этим летом, когда профессор Рончжун Ли основал компанию Petoi. Затем он собрал на краудфандинговой платформе Indiegogo $103520, закупил оборудование для резки по дереву и объявил о создании «домашнего животного, которому не нужна еда». Однако история уникальной разработки началась гораздо раньше. Это сложный путь от примитивных прототипов и перебора вариантов отдельных узлов до грациозного создания, которое не стыдно показать потенциальным инвесторам.
Вопреки сложившимся стереотипам, Рончжун Ли отказался делать очередного робопса, вроде Aibo. Ему захотелось показать, что роботы могут быть достаточно изящными – почти как живая кошка. Nybble может вставать на задние лапы, подкрадываться и совершать прыжки.
Робот оказался на удивление дешёвым – всего $250 по предзаказу. Такая низкая цена была достигнута за счёт использования микроконтроллера Atmel ATmega328P (как в Arduino UNO) в качестве «спинного мозга».
«Головным мозгом» робота стал одноплатный компьютер Raspberry Pi. С его помощью Nybble лучше ориентируется в пространстве, проявляет индивидуальные черты и использует элементы ИИ для адаптивного поведения.
В собранном виде габариты Nybble составляют 250x140x107 мм, а масса – 350 грамм. Он управляется с беспроводного ПДУ и питается от двух литий-ионных батарей, заряда которых хватает примерно на полчаса.

Ещё одна изюминка Nybble – техника изготовления. Все детали вырезаются лазером с допуском менее 0,25 мм из листа высококачественной фанеры. При сборке они фиксируют друг друга как 3D-пазл.
Подобную технику использует компания Ugears для изготовления механических конструкторов. Покупателям Nybble также предлагается самостоятельно собрать робота по видеоинструкции. Детальный процесс сборки описан в трёх частях.
Запрограммировать свой набор движений для Nybble поможет фреймворк OpenCat, доступный на GitHub.
Источник
Как сделать робокота


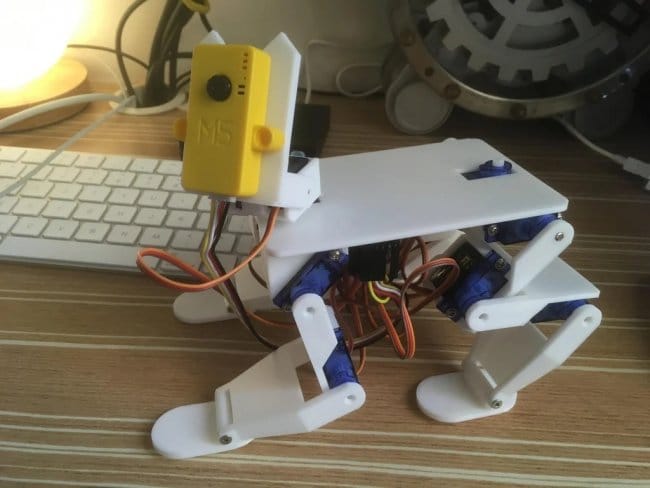
Мастер уже давно увлекается фигурами типа Strandbeest, Trotbot, проект с котом это его новое увлечение.
Основная цель проекта — робот должен выглядеть как кошка и вести себя как кошка.
Шаг первый: бионика*
*Бионика — прикладная наука о применении в технических устройствах и системах принципов организации, свойств, функций и структур живой природы, то есть формах живого в природе и их промышленных аналогах.
Чтобы сделать робота, похожего на кошку, нужно сначала изучить кошачий скелет.
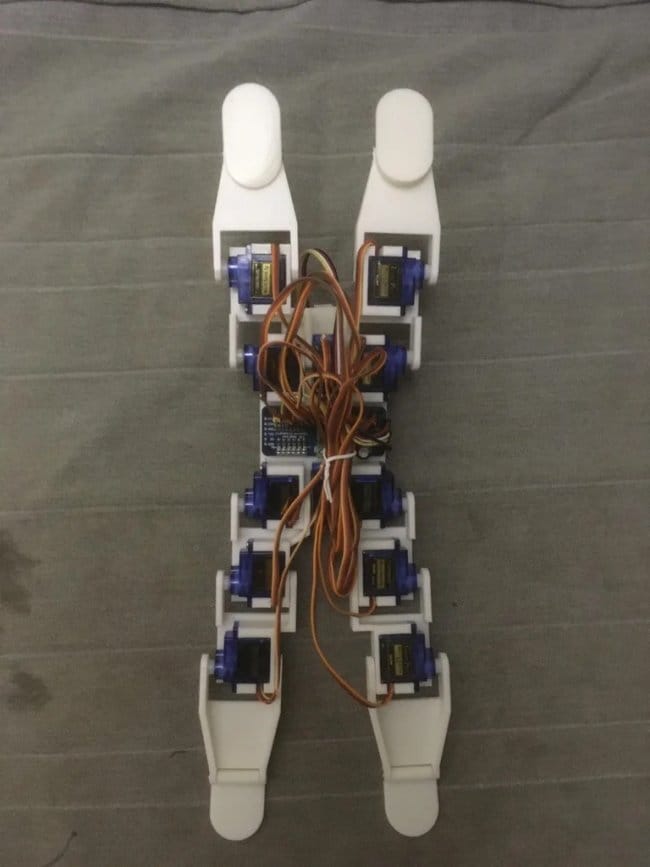
Кошка — дигиград, это означает, что она стоит или ходит на пальцах ног. Таким образом, у кошки есть заметные 3 сустава задних ног, в то время как у человека (плантиград) только 2 сустава. На передних лапах кошки пястные кости относительно короткие. Так что заметно два сустава для передних ног. Таким образом, робот-кошка имеет 2 сустава на передних ногах и 3 сустава на задних ногах, то есть 10 сервоприводов (у большинства других роботов-кошек и собак есть только 2 сустава для задних ног).
В голове и шее тоже должно быть много движущихся частей. В природе кошка наклоняет голову, шею, поворачивает и т.д. И хвост тоже довольно сложный орган в плане движения. Мастер решил не усложнять проект на данном этапе и будет устанавливать один сервопривод в хвост и два в шею.
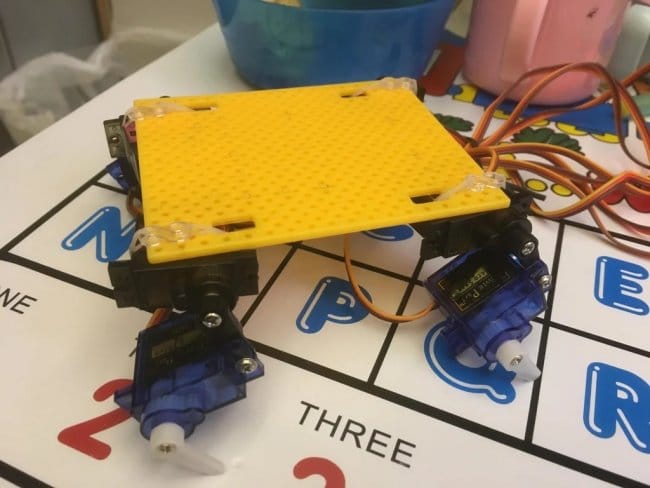




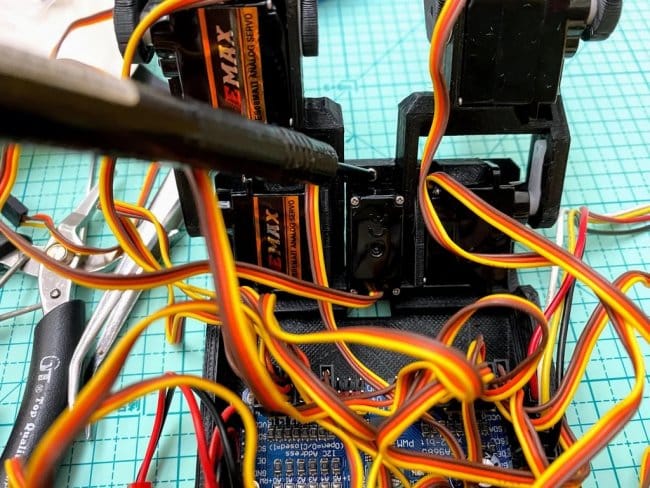
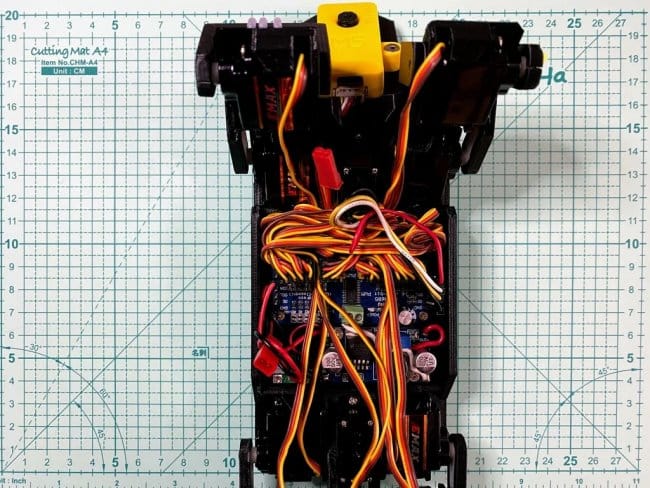
Шаг третий: электроника
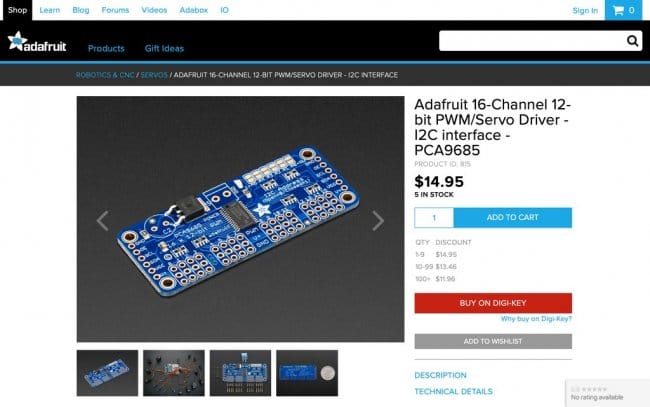
По моему предыдущему опыту, сервоприводы с прямым приводом с MCU GPIO — не лучший выбор. Гораздо стабильней установить отдельную плату драйвера.
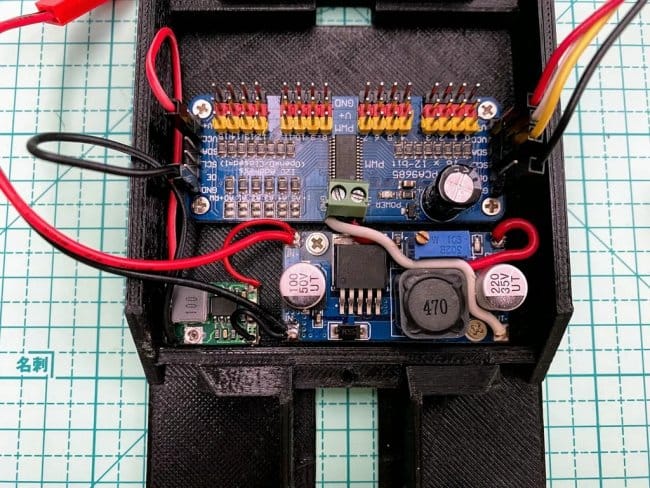
В данном проекте мастер использует плату драйвера PCA9685.
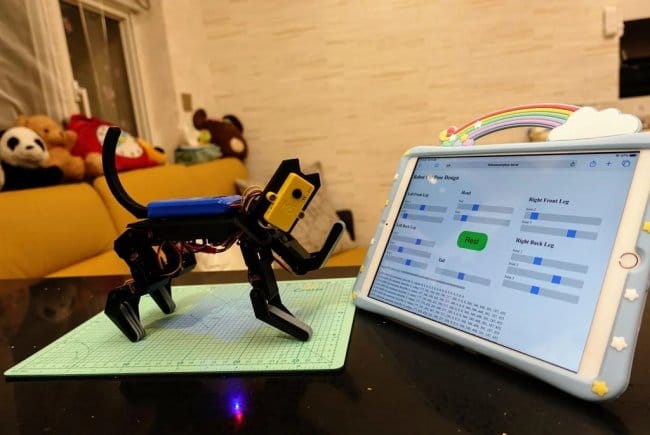
ESP32 имеет связанный пример под названием FSBrowser. Это простой веб-сервер, на котором размещаются исходные веб-файлы, скопированные в SPIFFS. У него есть простой веб-редактор для изменения источника через Wi-Fi, а также простой API для чтения значений GPIO.
Мастер расширил его возможности:
Добавлен API сервоплаты PCA9685.
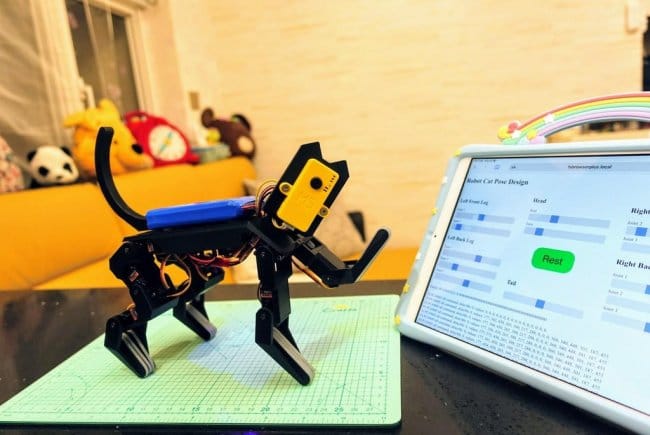
Добавлен сервер WebSocket
Добавлена веб-страница дизайна позы робота-кота.
Шаг четвертый: код
Загрузите и установите Arduino IDE:
https://www.arduino.cc/en/main/software
Следуйте инструкциям по установке, чтобы добавить ESP32:
arduino-esp32
Загрузите FSBrowserPlus: («Clone or Download» -> «Download ZIP»)
FSBrowserPlus
Загрузите последние библиотеки arduinoWebSockets: («Clone or Download» -> «Download ZIP»)
arduinoWebSockets
Импортируйте библиотеки в Arduino IDE. («Sketch» Menu -> «Include Library» -> «Add .ZIP Library» -> select downloaded ZIP file)
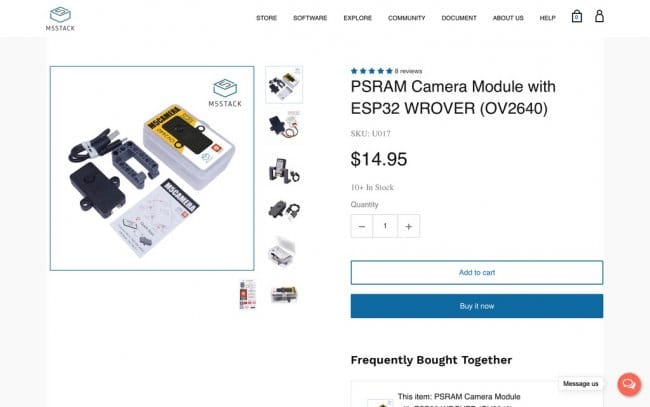
Подключите модуль камеры M5Stack с помощью USB-кабеля.
Откройте Arduino IDE
Открыть FSBrowserPlus
Измените ssid и пароль на свои собственные учетные данные точки доступа WiFi
Нажмите кнопку «Загрузить» в Arduino IDE.
Шаг пятый: сборка
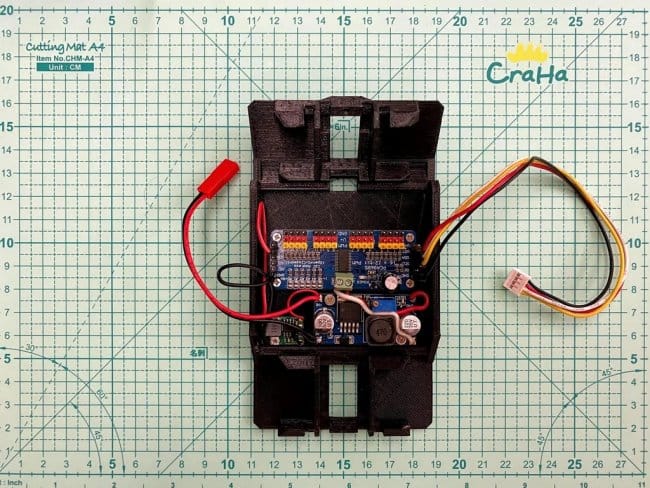
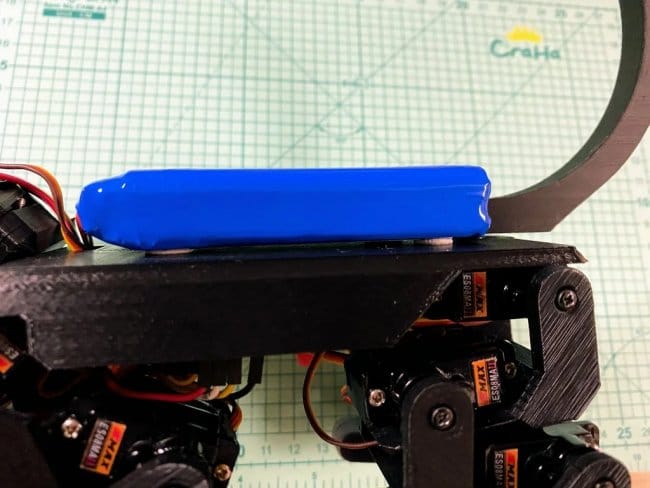
Дальше мастер производит монтаж электроники.
Штекер Lipo Battery
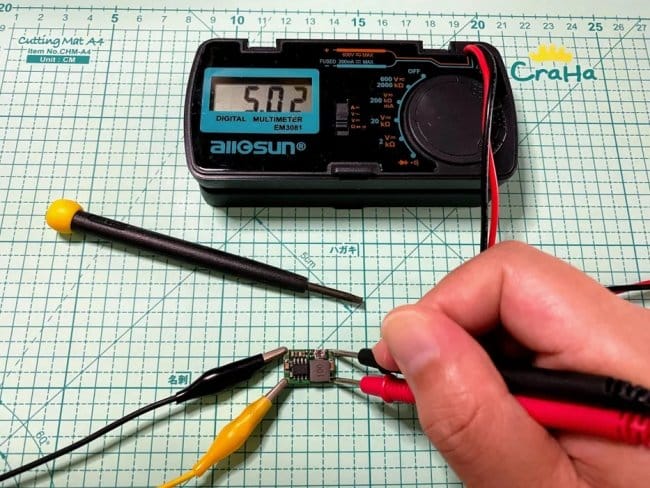
Вывод + ve — вход регулятора постоянного тока 5 В + вывод ve
Регулятор постоянного тока 6В INPUT + ve pin
-ve контакт— ВХОД регулятора 5 В постоянного тока -ve контакт
Регулятор 6V DC INPUT -ve pin
Плата сервопривода PCA9685
Вывод GND — Вывод регулятора 5V DC -ve
ВЫХОД регулятора постоянного тока 6 В — вывод
провод черный контактный
разъем SCL -> разъем желтого кабеля Grove
разъем SDA -> разъем белого цвета кабеля Grove
Вывод VCC -> ВЫХОД регулятора постоянного тока 5 В + вывод ve
Кабель Grove красный контакт
Вывод V + -> Регулятор постоянного тока 6 В ВЫХОД + вывод ve

Шаг шестой: положение сервопривода и подключение
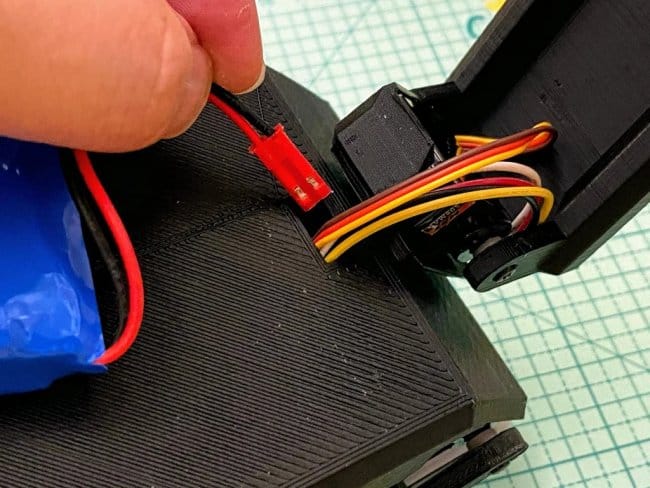
Программа FSBrowserPlus устанавливает все сервоприводы в среднее положение диапазона поворота. Перед установкой сервоприводов лучше подключить сервоприводы к плате драйвера, подключить разъем Grove к модулю камеры M5Stack и подключить батарею, чтобы установить все положения сервоприводов в среднее положение.
Ниже список сервоприводов ос схемой подключения.
Порт 0: соединение левой передней ноги 1
Порт 1: шарнир левой передней ноги 2
Порт 2: сустав 1 левой задней ноги
Порт 3: сустав левой задней ноги 2
Порт 4: сустав левой задней ноги 3
Порт 5: поворот головы
Порт 6: наклон головы
Порт 7: не подключен
Порт 8: не подключен
Порт 9: не подключен
Порт 10: Хвост
Порт 11: сустав правой задней ноги 3
Порт 12: сустав правой задней ноги 2
Порт 13: сустав правой задней ноги 1
Порт 14: сустав правой передней ноги 2
Порт 15: сустав правой передней ноги 1
Шаг седьмой: сборка
Чтобы лапы не скользили и не разъезжались нужно установить на ни резинки.


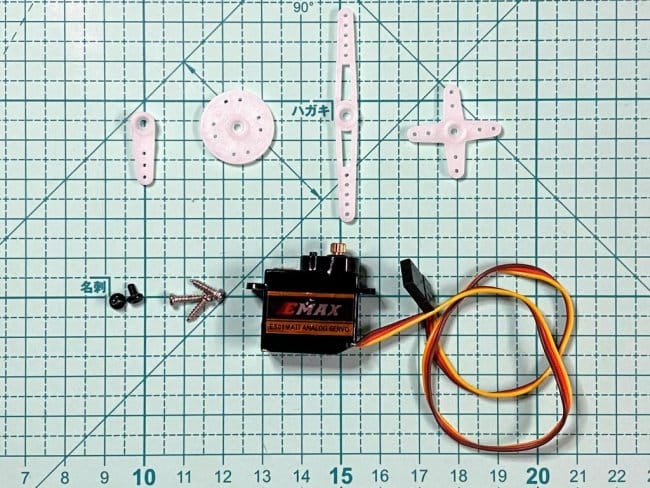
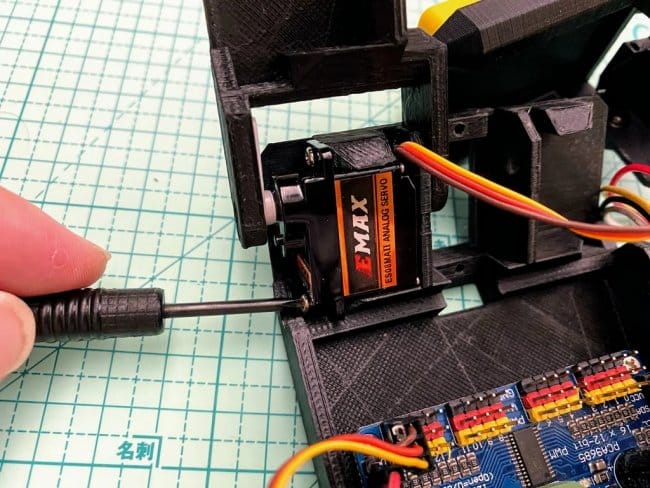
В комплект сервопривода входит несколько типов нейлоновых рычагов. Нужно установить самый короткий нейлоновый рычаг на сервоприводы, кроме сервопривода отвечающего за поворот головы.
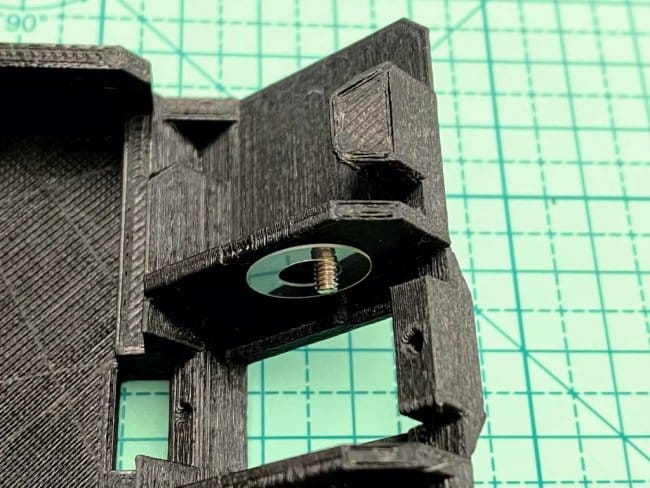
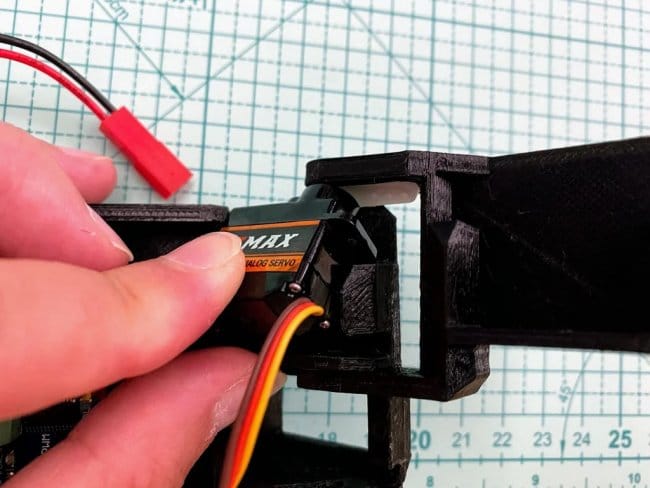
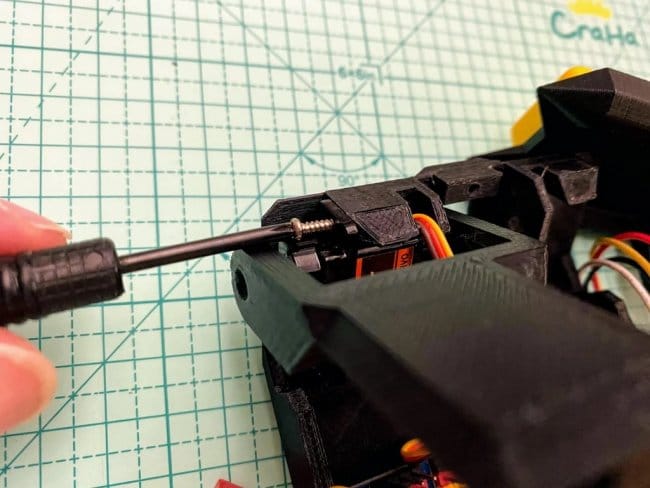
Дальше установить сервопривод в шарнир.
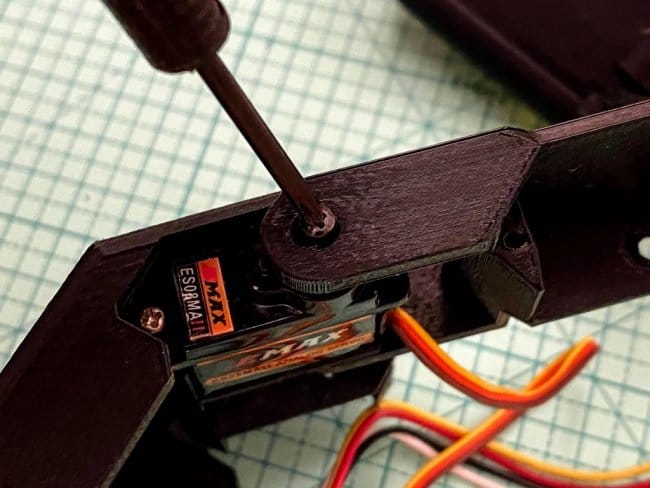
Подключите аккумулятор, чтобы убедиться, что положение сервопривода находится в середине диапазона поворота. Затем закрутите 2 крепежных винта с обеих сторон. Закрутите черный винт вместе с шарниром.
Повторите шаги установки шарнира и сервопривода для всех 10 суставов ног.
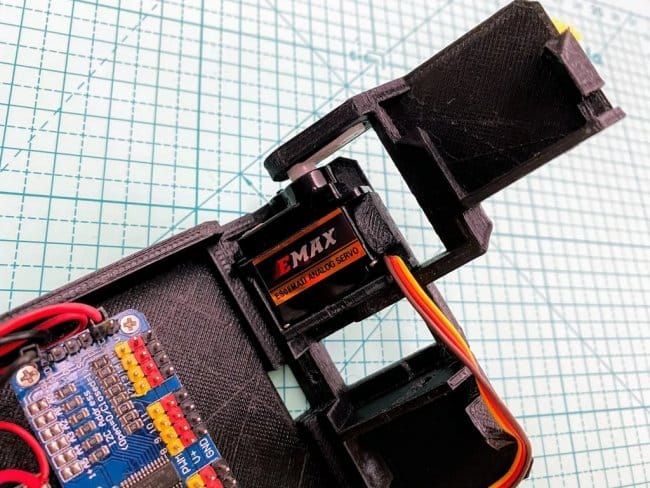
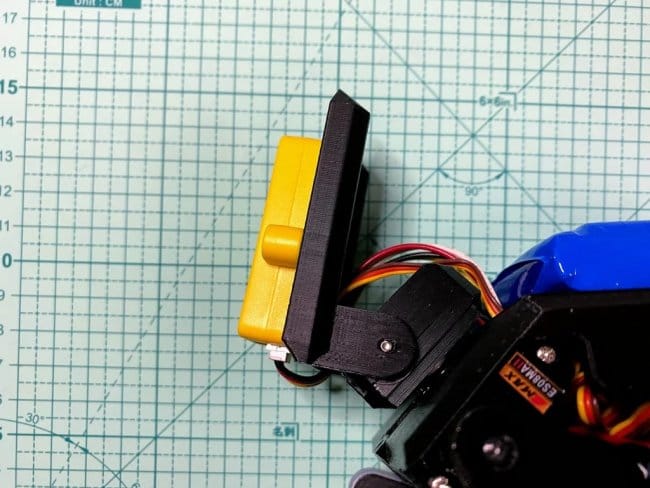
Сервопривод поворота головы может быть установлен как сверху, так и снизу, в зависимости от того, хотите ли мы иметь шею длиннее или короче.
Метод установки сервопривода наклона головы такой же, как и для суставов ног. Затем устанавливаем модуль камеры M5Stack с помощью двух винтов M4 12 мм.
Сервопривод хвоста должен быть установлен с нижней стороны и зафиксирован винтом M2 8 мм.






Источник
Робот для кошки
Игрушки для домашних животных обычно рассчитаны на игру вместе с хозяином, но Ebo может играть с кошкой даже когда дома никого нет. Ebo — умный робот-компаньон для игры с кошкой.
Авторы проекта говорят о том, что кошки — социальные существа, которым нужно внимание человека. Поэтому они скучают по своим хозяевам, когда те уходят.
Без длительного общения у животного развивается депрессия, ожирение, стресс, алкоголизм. И чтобы избежать всего этого придумали робота Ebo, который играет с питомцем, когда никого нет дома.
Робот подключается к Wi-Fi и позволяет следить за котом через HD камеру, фотографировать его или снимать видео.
Ebo катается по полу, переворачивается, танцует, издает звуки и таким образом играет с кошкой. Робот имитирует движения живого существа, поэтому всегда перемещается непредсказуемо.
Перед началом игры робот сканирует помещение на 360°, чтобы убедиться, что места для движения будет достаточно. С помощью встроенного сенсора робот может автоматически менять направление движения, если встретит препятствие.
В приложении можно следить за состоянием здоровья питомца, устанавливать расписание для игр, вести прямую трансляцию с Ebo и вручную выбирать режим игры. Через приложение можно самому управлять роботом и играть лазерной указкой со своим питомцем.
Состояние здоровья кошки отслеживается с помощью отдельного ошейника, который считает шаги, уровень активности и другие показатели. Аккумулятора в ошейнике хватит на 30 дней, зарядить его можно от док-станции Ebo. Если ошейник застрянет, то он автоматически расстегнется, чтобы избежать удушья.
Источник
Китайцы сделали кошку-робота


MarsCat будет доступна в белом, сером, рыжеватом и черном цветах. Она оснащена шестью емкостными сенсорными датчиками, 5-мегапиксельной камерой, установленной в носу, и работает с помощью компьютера Raspberry Pi 3. Разработчики сообщили порталу The Verge, что робокошка может работать примерно в течение двух-трех часов на одном заряде при активном использовании и до пяти часов при небольшом использовании.
По словам Elephant Robotics, взаимодействия пользователя с MarsCat должны формировать ее «индивидуальность». Например, если человек будет много разговаривать с робокошкой, она будет чаще «мяукать» в ответ. При этом, как отмечает компания, MarsCat может распознавать 20 ключевых слов.

Компания указывает, что для робота также можно будет создавать запрограммированные действия с помощью открытого API и Raspberry Pi. Пока специального места, где разработчики могут делиться созданными действиями для MarsCat нет, однако Elephant Robotics отмечает, что к началу поставок робокошки такое место должно появиться на ее (компании) официальном сайте.
Подробнее ознакомиться с MarsCat можно на официальном странице проекта на Kickstarter. Краудфандинговая кампания продлится еще 43 дня, однако уже сейчас компания собрала около 33 тысяч долларов (при завяленной цели в $20 000).
Источник